
1 / 2
GRASP
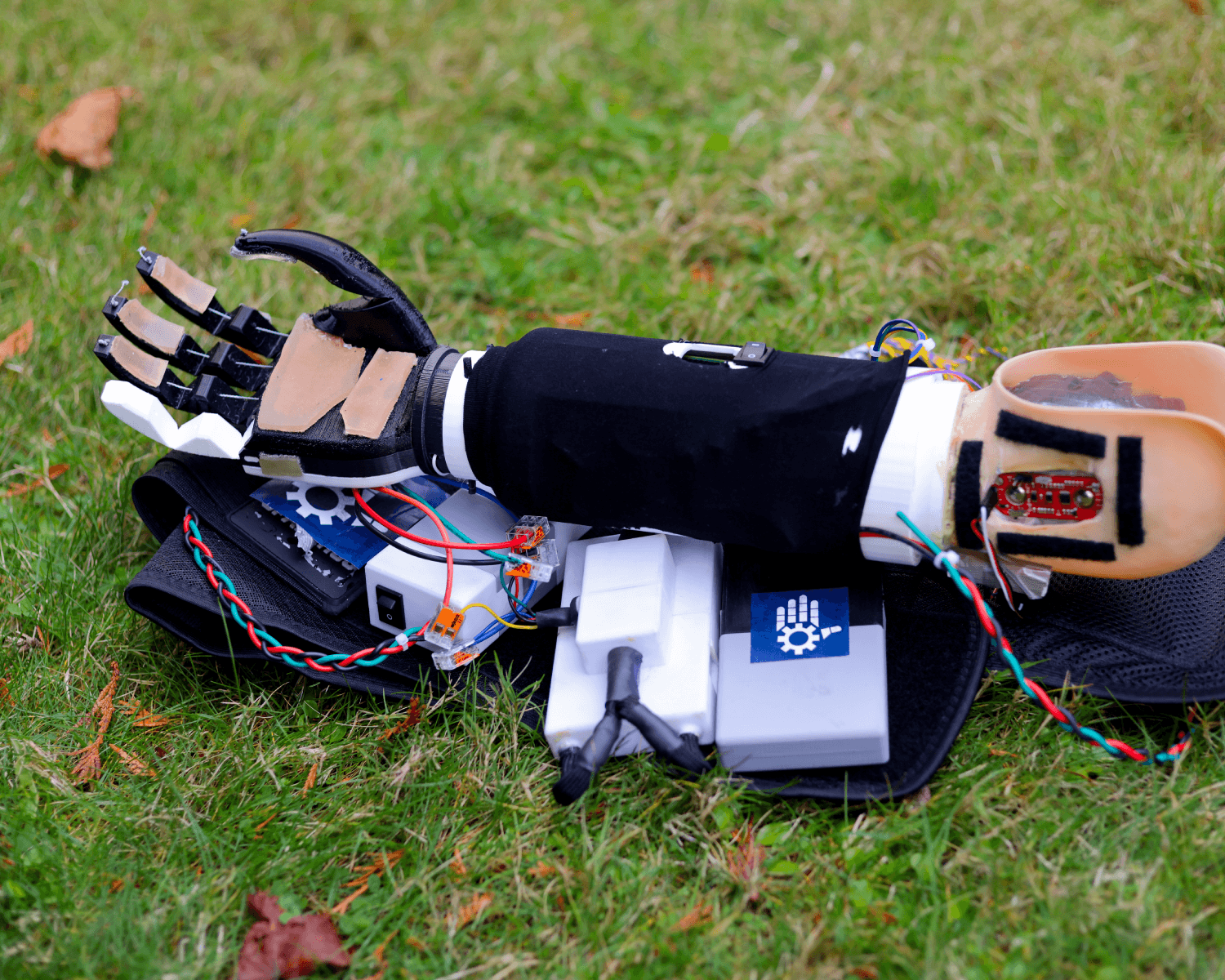
GRASP is our pilot project, a smart prosthetic arm integrating electromyography, computer vision, and 3D printing techniques, designed for a trans-radial forearm amputee!
Our current design features a variety of funtionalities including the following:
- Analysis of EMG data to control the hands (ANA)
- Grip optimization that utilizes a camera on-board the arm for object recognition (ANA)
- Integration with machine learning (ANA)
- Translation of EMG signals into mechanical motion (EMB)
- Design core framework that interfaces with outputs provided by electrical and analytical subteams (EMB)
- Implementation of signal processing (Rust and Python)
- Improved finger actuation to optimize physical grips (MECH)
- Use of ergonomic shouler brace for minimized load (MECH)
- Integration of wrist rotation and passive locking mechanism (MECH)
2 / 2
NERV
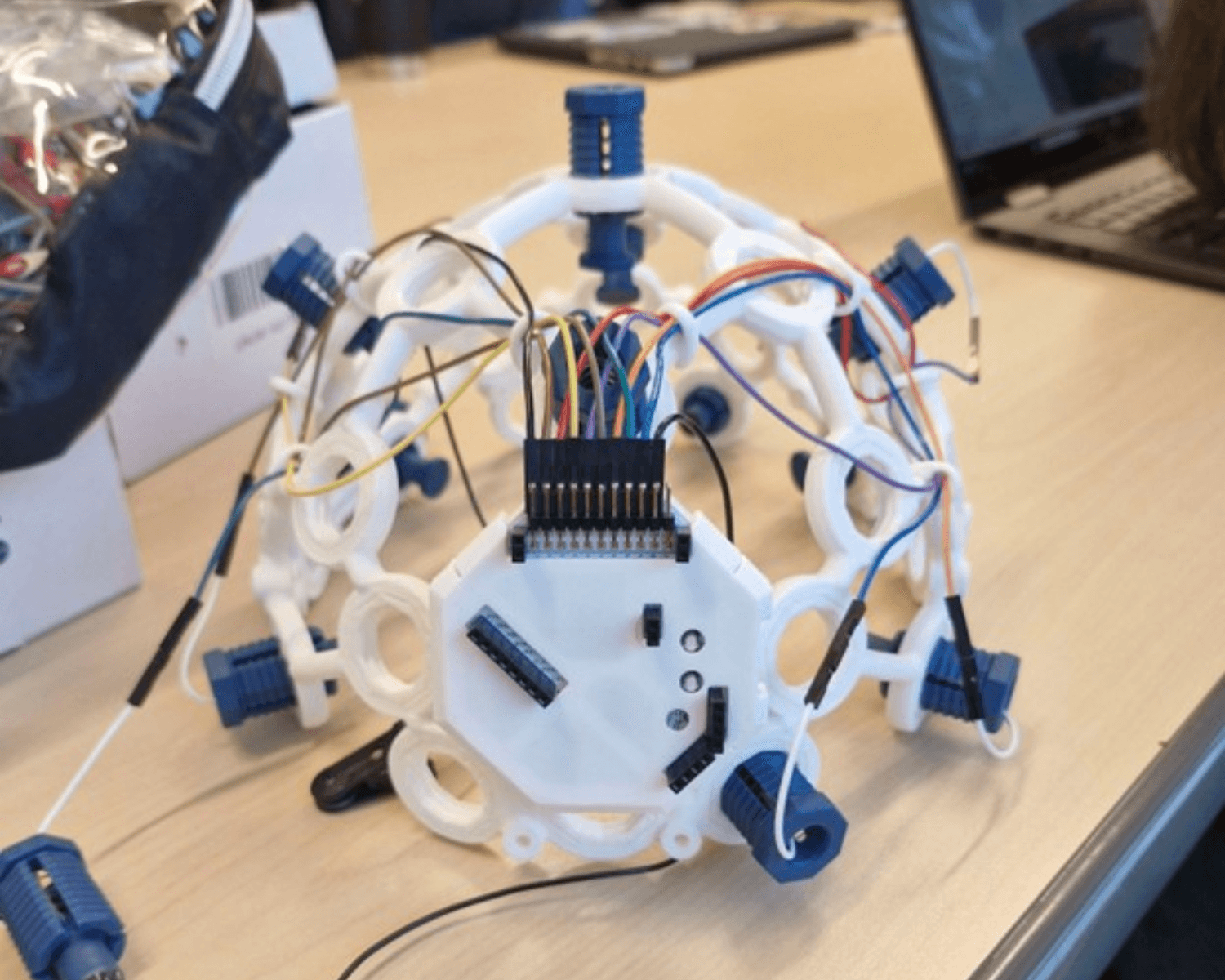
NERV is our current design of a brain-computer interface (BCI) aiming to process EEG signals to autonomously control an output device, for individuals paralyzed from the neck below.
We are aiming to build a non-invasive BCI targeting pilots with significant motor impairments, particularly those with spinal cord injuries at the C5 level or above, having little to no motor function from the neck down.
Our current design is focusing on completing tasks associated with ETH Zurich's Cybathlon 2024 requirements, including:
- Navigating through furniture and obstacles
- Catching ice cubes in a cup
- Controlling a computer cursor and clicks
- Operating a key and lock mechanism
- Avoiding moving vacuum cleaners